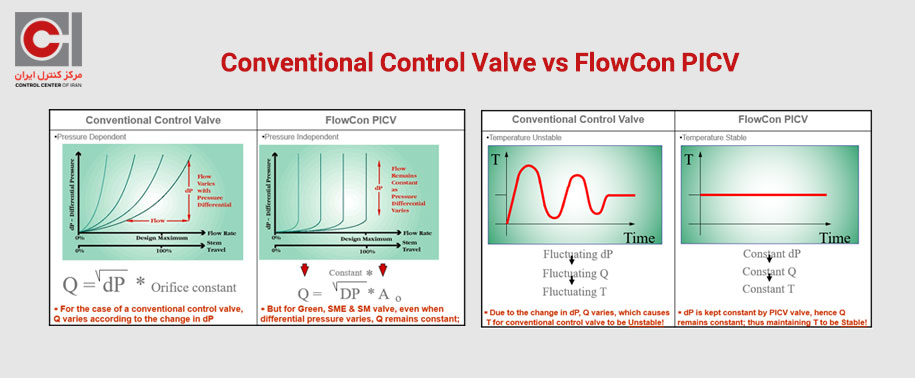
هدف از این مقاله، شرح عملکرد شیر کنترل مستقل از فشار (PICV) در حفظ اقتدار %100 و افزایش دقت در کنترل ΔT، در مقایسه با شیرهای کنترل دو راهه میباشد.
کنترل ΔT توسط شیرهای کنترل دو راهه
شیر کنترل دو راهه، کاملاً بر اساس افت فشار عمل میکند. بدین ترتیب، هنگامی که شیر کنترل بسته میشود، افت فشار مدار افزایش یافته و به موجب آن جریان کاهش مییابد و زمانی که شیر کنترل باز میشود، بالعکس.
با کاهش جریان، سایر اجزای مدار از قبیل شير بالانسينگ، پایانهی حرارتی و لولهها جریان کمتر و نتیجتاً افت فشار کمتری را تجربه خواهند کرد. جریان عبوری از هر یک از اجزای سيستم (در این مورد، شير بالانسينگ، پایانهی حرارتی و لولهها) از رابطه ΔP√Q=A* تبعیت میکند و از آنجا که اجزای نامبرده شده همگی دارای سطح عبور جریان ثابتی میباشند، رابطه زیر در مورد آنها صادق است:
↓ΔP√Q=A*↓
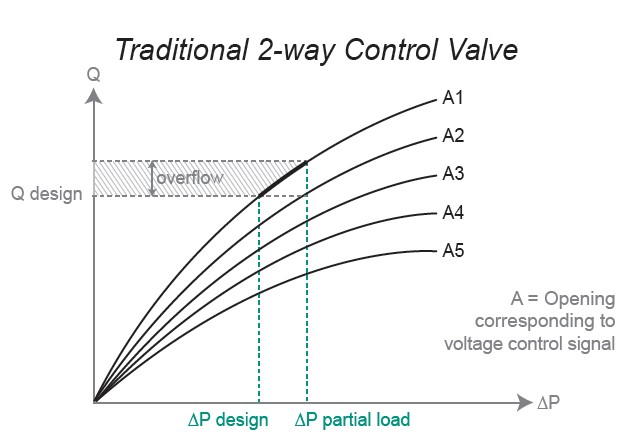
هنگامی که، با بسته شدن شیر کنترل، افت فشار دو سر آن افزایش می یابد، افت فشار بقیه اجزای مدار کاهش خواهد یافت. بنابراین برای جبران و تعدیل این امر، شير کنترل باید بيشتر بسته شود. در شکل 1، در حالتی که شیر کنترل کاملأ باز باشد، افزایش ΔP طراحی به ΔP بار جزیی، طبق منحنی A1، موجب ایجاد جریان عبوری مازاد میگردد، برای ثابت نگه داشتن جریان و برای جبران نوسانات فشار باید از منحنی A1 به منحنی A2 منتقل شد. این رابطه بصورت زیر بیان می شود:
↑ΔP√Q=↓A*
و برای کاهش بیشتر جریان، شیر باید باز هم بیشتر بسته شود.
همانطور که از روابط بالا مشخص است، افت فشار شیر بالانس، پایانهی حرارتی و لولهها بر عملکرد شیر کنترل دو راهه، که وابسته به فشار عمل میکند، تأثیر بسزایی دارد.
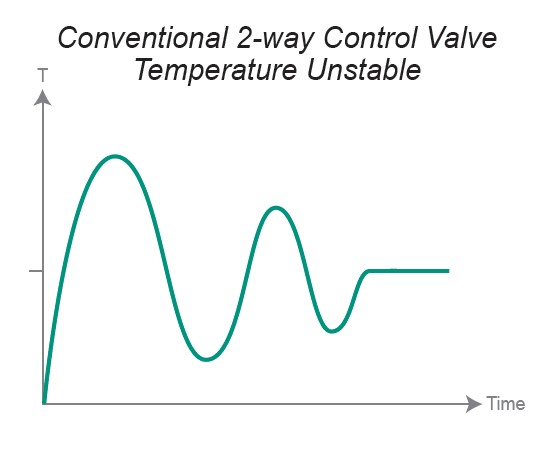
بر اساس عملکرد وابسته به فشار شیر کنترل دو راهه، نوسانات ΔP منجر به نوسان جریان و به موجب آن نوسان ΔT خواهد شد (شکل 2).
برهمکنش بین اجزای مدار در محاسبه اقتدار شیر لحاظ میشود. تضمین انتخاب درست شیر کنترل دو راهه و اطمینان از اینکه شیر دارای اقتدار لازم جهت کنترل جریان میباشد، از این طریق صورت میگیرد. اقتدار، مشخص میکند که شیر کنترل دو راهه دقیقاً چه مقدار باید تغییر وضعیت دهد تا تأثیر بقیه اجزای مدار را جبران کند. اقتدار شیر کنترل دو راهه از رابطه زیر تعیین میشود:
(Au = ΔPControl Valve / (ΔPControl Valve+ΔPBalancing Valve+ΔPCoil
از آنجایی که افت فشار لوله در برابر سایر اجزای مدار ناچیز است، معمولأ در رابطه بالا از آن صرف نظر میشود، اما در واقعیت در اقتدار شیر به میزان اندکی دخیل است.
اقتدار قابل قبول شیر باید در حدود 50% باشد، بنابراین حداقل افت فشار مورد قبول شیر کنترل دو راهه برابر است با:
PControl Valve =ΔPBalancing Valve+ΔPCoilΔ
که اغلب منجر به افت فشار بالایی برای شیر کنترل دو راهه خواهد شد و این خود به معنی مصرف انرژی مازاد جهت پمپاژ میباشد.
اقتدار کمتر از 50% نشاندهنده این است که شیر کنترل دو راهه، جریانی مازاد بر مقدار مورد نیاز (بر اساس سیگنال کنترلی) را عبور میدهد. که این امر منجر به مصرف زیاد انرژی و عدم آسایش حرارتی میشود.
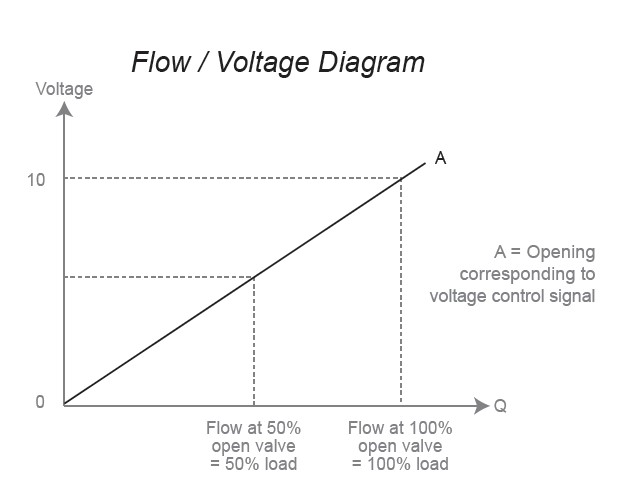
اگر جریان عبوری یک سیستم با اقتدار 50% به ترتیب در 100% و 50% بار بررسی شود، نتیجه این بررسی به صورت شکل 3 قابل بیان است:
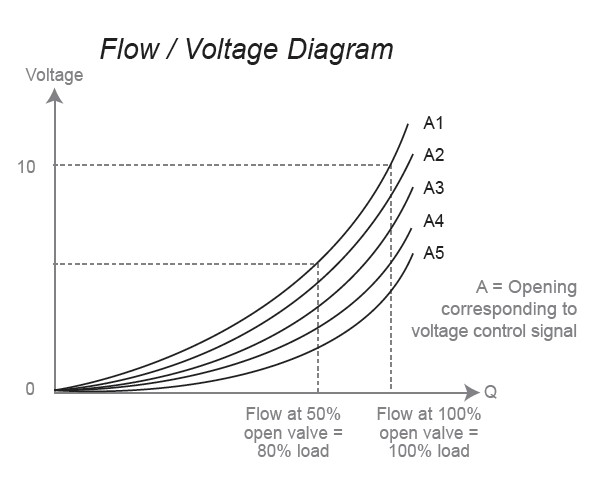
همانطور که در شکل 3 قابل مشاهده است، جریان با سیگنال کنترلی همسان نیست. این ناهماهنگی از این واقعیت ناشی میشود که اگر شیرهای کنترل و بالانس جدا باشند، اقتدار 100% به دست نخواهد آمد. به علاوه باید توجه شود که حفظ یک ΔT معین، منوط به حفظ یک جریان معین مورد نیاز میباشد. اما بر اساس این واقعیت که جریان خیلی بیشتری (80% به جای مقدار مورد نیاز 50%) دریافت میشود، نتیجه چیزی خواهد شد که به عنوان سندروم ΔT پایین شناخته میشود.
هنگامی که از شیرهای کنترل دو راهه در سیستم سرمایش با چیلر استفاده میشود این مسئله غیر قابل اجتناب و بسیار رایج خواهد بود. اغلب این مشکل با کاهش غیر ضروری دمای آب سرد خروجی از چیلر و یا افزایش دمای هوای عبوری از کویلها پنهان میشود، گرچه هر دوی این راه حلها نیاز به انرژی اضافی و “بالانسینگ“ دارند.
کنترل ΔT توسط شیرهای کنترل مستقل از فشار (PICV)
نقطه تمایز یک شیر کنترل مستقل از فشار (PICV) در قرار گرفتن یک شیر کنترل دو راهه و یک شیر کنترل اختلاف فشار در یک مجموعه واحد میباشد. با قرار دادن یک عملکرد کنترل فشار در شیر کنترل، شیر تحت شرایط زیر عمل میکند:
? =?∗(√ΔP)????????
همانطور که در شکل 4 مشهود است با مستقل از فشار (PICV) عمل کردن شیر، هر وضعیت شیر کنترل متناظر با جریان مربوطه میباشد.
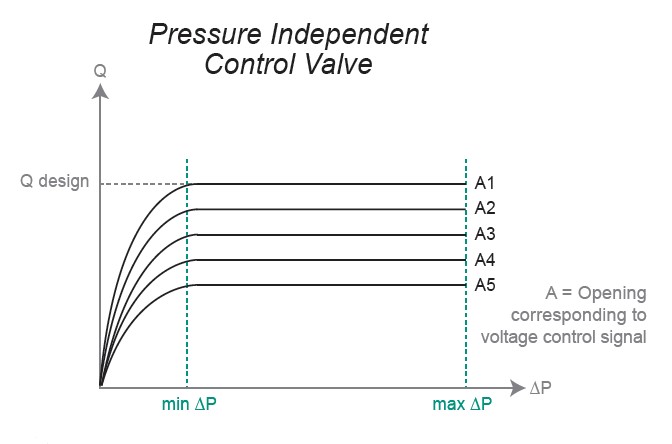
با توجه به نمودار بالا، تغییر در فشار نه در عملکرد و نه در جریان عبوری از شیرهای کنترل مستقل از فشار (PICV) تأثیرگذار نخواهد بود. از آنجا که در محدوده اختلاف فشار معین، رابطه ای بین افت فشار و جریان عبوری وجود ندارد، محاسبات فشار مربوط به اقتدار شیر بلا استفاده میباشد. از آنجا که سطح عبور جریان یک شیر کنترل مستقل از فشار (PICV) تنها جزء مدار است که جریان را تعیین میکند (بر اساس عملکرد مستقل از فشار) اقتدار این شیر 100% است.
اگر جریان عبوری یک سیستم با اقتدار 100% به ترتیب در 100% و 50% بار بررسی شود، نتیجه نمودار شکل 5 میباشد که این اقتدار 100 درصدی را تعبیر میکند.
همانطور که از شکل 5 مشاهده میشود، جریان با سیگنال کنترلی همسان است. این همسانی بر اساس این واقعیت است که با یکپارچه کردن شیرهای کنترل و بالانس، اقتدار 100 درصدی حاصل میشود. سیگنال کنترلی خواستار یک جریان معین جهت حفظ یک ΔT مشخص است که برخلاف راه حل متعارف شیرهای کنترل و بالانس جداگانه، به این جریان معین دست خواهد یافت. بر اساس عملکرد مستقل از فشار (PICV)، ΔP ثابت منجر به جریان ثابت و در نتیجه ΔT ثابت خواهد شد. با کنترل دقیق جریان و خنثی کردن نوسانات فشار، از مشکل سندروم ΔT پایین به طور قابل توجهی اجتناب میشود.
همچنین از آنجایی که افت فشار کمی در شیرهای کنترل مستقل از فشار (PICV) نیاز است، این تکنولوژی مصرف بهینهتر انرژی را تضمین میکند. اقتدار 100% نشان میدهد که یک شیر کنترل مستقل از فشار (PICV) اجازه عبور جریانی معین بر اساس سیگنال کنترلی را میدهد که منجر به ایجاد شرایط آسایش و کنترل انرژی به بهترین صورت ممکن میگردد.
نتیجه گیری
شیر کنترل دو راهه به افت فشار عکس العمل نشان میدهد، بنابراین توسط سایر اجزای مدار تحت تأثیر قرار میگیرد که این مسئله محاسبه اقتدار شیر را الزامی میکند. راه صحیح محاسبه اقتدار به صورت زیر است:
(Au = ΔPControl Valve / (ΔPControl Valve+ΔPBalancing Valve+ΔPCoil
اقتدار استاندارد مورد قبول در حدود 50% است، که نشان میدهد کمترین افت فشار در شیر کنترل دو راهه برابر است با:
PControl Valve =ΔPBalancing Valve+ΔPCoilΔ
رابطه بالا اغلب به مثابه افت فشار نسبتاً بزرگی در دو سر شیر کنترل دو راهه و نتیجتاً مصرف انرژی بالایی خواهد بود. از طرفی اقتدار کمتر موجب می شود شیر کنترل دو راهه جریان بیشتری نسبت به آنچه سیگنال کنترلی طلب میکند را عبور دهد که باعث مصرف بیشتر انرژی، کاهش ΔT و آسایش حرارتی نامطلوب خواهد شد.
بر اساس اقتدار، رسیدن به دمای صحیح مورد نیاز، بدون بالانسینگ سیستم، مشکل و یا غیر ممکن خواهد بود. از این رو سیستم از پدیده سندروم ΔT پایین رنج خواهد برد.
شیرهای کنترل مستقل از فشار (PICV)، همانطور که از نامشان پیداست، وابسته به فشار نیستند و تا زمانی که افت فشار شیر در محدوده مجاز عملکرد شیر باشد، توسط سایر اجزای سیستم تحت تأثیر قرار نخواهند گرفت، از این رو هنگامی که در مورد شیرهای کنترل مستقل از فشار (PICV) صحبت میشود سایر اجزای مدار نادیده گرفته میشوند. بنابراین چنین شیری اقتدار 100 درصدی را در همه شرایط حفظ کرده و بخش کنترل اختلاف فشار شیر، هر تغییری در فشار سیستم را خنثی میکند.
از آنجایی که در شیر کنترل مستقل از فشار (PICV) افت فشار کمتری را شاهد خواهیم بود، در مجموع افت فشار مدار و مصرف انرژی کاهش خواهد یافت.
اقتدار 100% حاکی از آن است که شیر کنترل مستقل از فشار (PICV) اجازه عبور جریانی معین بر اساس سیگنال کنترلی را میدهد که منجر به ایجاد شرایط آسایش و کنترل ΔT و انرژی به بهترین صورت ممکن میگردد. با کنترل دقیق جریان، از ایجاد سندروم ΔT پایین به طرز چشمگیری جلوگیری خواهد شد.





















